안녕하세요.
하고싶은게 비행✈ 인 사람입니다.
예전에 생각해보면 GPS 라는 것은 정말로 비싼 것이었던 것 같습니다.
어릴 적 부모님 따라 운전하다 보면 열심히 고속도로 지도 꺼내서
우리가 어디쯤인지 확인하고 했었는데
어느 순간부터 네비게이션이 나오기 시작하더니
이제는 네비게이션 기기 없이 휴대폰으로 원하는 곳을 찾아가고 있습니다.
1. GPS 란?
GPS 는 Global Positioning System 의 약자이다.
인공위성으로부터 신호를 받아서 현재 위치를 계산하는 것으로
(Satellite 는 1초에 1,000 번의 신호를 보냄)
원래는 미국 국방부에서만 사용되었으나
1990년대이후 civilian use 로 풀리게 되었다.
- Aircraft 는 GPS 를 이용하여 IFR (domestic enroute, terminal operations, certain IAPs) 를 할 수 있으며
GPS 를 IFR 에 사용하기 위하여 여러가지 조건이 필요하다. (AIM 1-1-17b2)
2. GPS 의 3요소
1) Space : Satellites 의 위치
2) Control : DoD
3) User (receiver)
3. Space segment
먼저 satellite 는
6개의 orbital planes 에
4개의 operating sat. + 1개의 spare sat. 으로
총 30개의 sat. 이 있다.
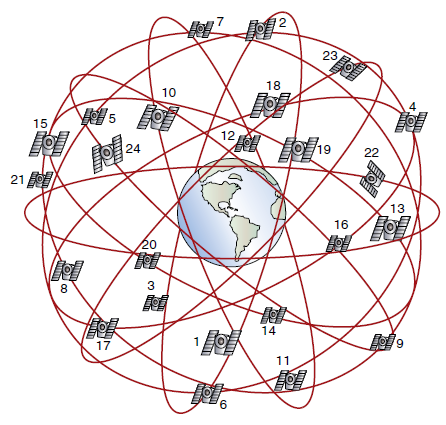
하나의 orbital plane 은 60º씩 떨어져 있으며
각 plane 은 55º의 inclination angle 을 가진다.
지구 어느 곳에서나 최소 4개의 sat. 을 볼 수 있고
보통은 6~8개의 sat. 을 볼 수 있다 (in view)
GNSS Frequently Asked Questions - GPS
GNSS - Frequently Asked Questions - GPS What is GPS? How is GPS used? Who uses GPS? What's the status of the GPS? What are the service levels provided by GPS? What is Selective Availability (SA)? Why was SA necessary? What is the status of Selective Availa
www.faa.gov
1) Pseudo-Random Code
sat 은 1초에 1,000번 신호를 보내게 된다.
그 신호에는 위치와 시간이 기본으로 포함되어 있다.
Pseudo-Random Code 는 두 종류
① A coarse Acquisition (C/A) code
② A Precision (P) code
두 가지가 있다
무료로 풀린 C/A code 는
100 meters in position 과 140 feet in altitude with a 95% probability 를 가진다.
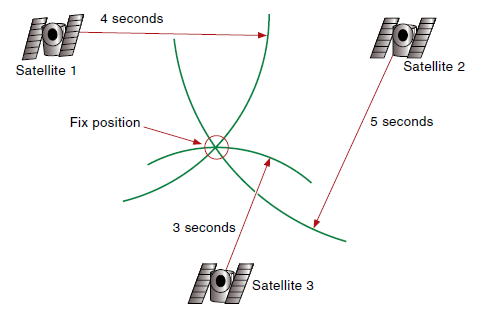
2) 위치 확인
3개의 위성이 있을 경우 2 dimensions, 4개의 인공 위정이 있으면 3 diomensional 위치 정보 확인이 가능하다.
4. Control Segment
The controlling authority 는 미국방부가 가지고 있다.
Control segment 에는 monitoring stations 를 포함하여
ground antennas, up-links 와 master station 등이 있다.
station 에서는 인공위성의 시간과 orbit 상태등을 확인하며
인공 위성의 수명은 보통 7~8 년 이라고 한다.
5. User Segment (The receiver)
말 그래도 사용자에 해당한다.
1) 기본 원리
Receiver 는 Pseudo-random code를 받아 해석하고 위치정보 등을 보여준다.
위치정보는
① 인공 위성의 위치를 알고
② 신호를 보낸 시간을 알고
③ 수신자의 신호를 받은 시간을 알고
④ 신호의 속도를 알고
⑤ 최소 4개의 위성으로 받은 정보를 합쳐
현재 위치를 알 수 있게 된다.
인공위성이 보내는 정보에는
Ephemeris data 가 있고
비행기의 data에는
Almanac data 가 있다.
Ephemeris data 의 경우 수신까지 6초, Almanac data 의 경우 수신까지 13초가 걸리기 때문에
Almanac data 는 비행기의 메모리에 저장해둔다.
※ Almanac data 에도 Sat. 의 위치가 있다. 그러나 Sat. 이 가지고 있는 ephemeris data 를 같이 받으면 위치정보를 더 정확하게 파악할 수 있으며, initial position 파악이 더 빨라진다.
C/A code 에는 인공 위성의 위치(sat. no)와
신호를 보내는 시간이 같이 보내지기 때문에
신호를 수신 했을때와의 시간을 비교하여
거리를 알 수 있게 된다.
(시간이 굉장히 중요하기 때문에 sat. 의 시계는 atomic watch 를 사용한다.)
2) FAA Technical Service Order (TSO C129) - receiver design
IFR/ primary navigation certification specifications for GPS equipment 는
multipleceiver channels 과 a navigation integrity monitoring system (RAIM - receiver autonomous integrity monitoring) 을 요구한다.
3) Error
GPS에도 몇 가지 error 가 있다.
먼저
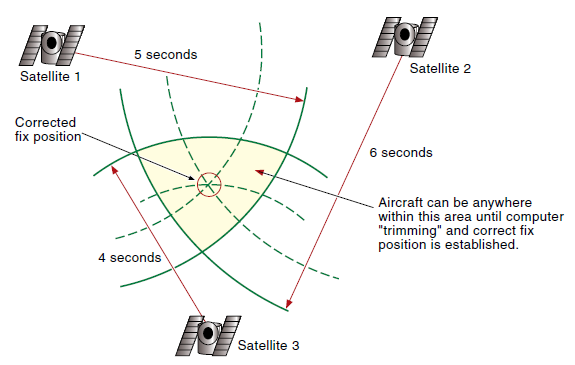
ⓛ Timing error
GPS를 통한 위치계산은
Pseudo-random code 를 위성으로 부터 받아 비행기에서 그 시간차를 계산에 거리를 파악한다. 그리고 Ephemeris data에 대입해 내 위치를 나타내게 된다. 말 그대로 시간차를 이용하기 때문에 시간차를 정확하게 파악하지 못하면 위치에 대한 오차가 발생하게 된다.
이것은 Trimming process 를 receiver 에서 수행하여 최소화시킨다.
② PDOP or GDOP
The position dilution of precision 또는 the geometric dilution of precision 의 약어이다.
이 PDOP 는 인공위성의 위치에 따라 달라진다.
인공위성은 여러개의 인공위성으로 부터 오는 신호를 잡아 receiver 에서 위치를 계산해낸다.
이 과정중에 오차가 발생하게 되는데
인공위성끼리 가깝게 있을 수록 이 오차는 더 커지게 된다.
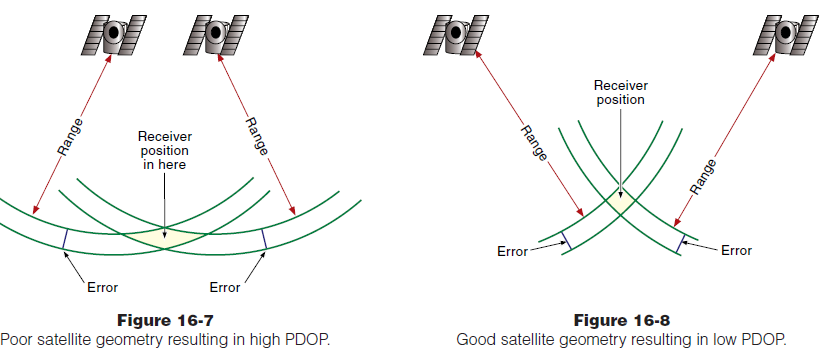
PDOP value 가
6보다 작아야 en-route 에서 사용 가능하며
3보다 작아야 non precision approach 에서 사용 가능하다.
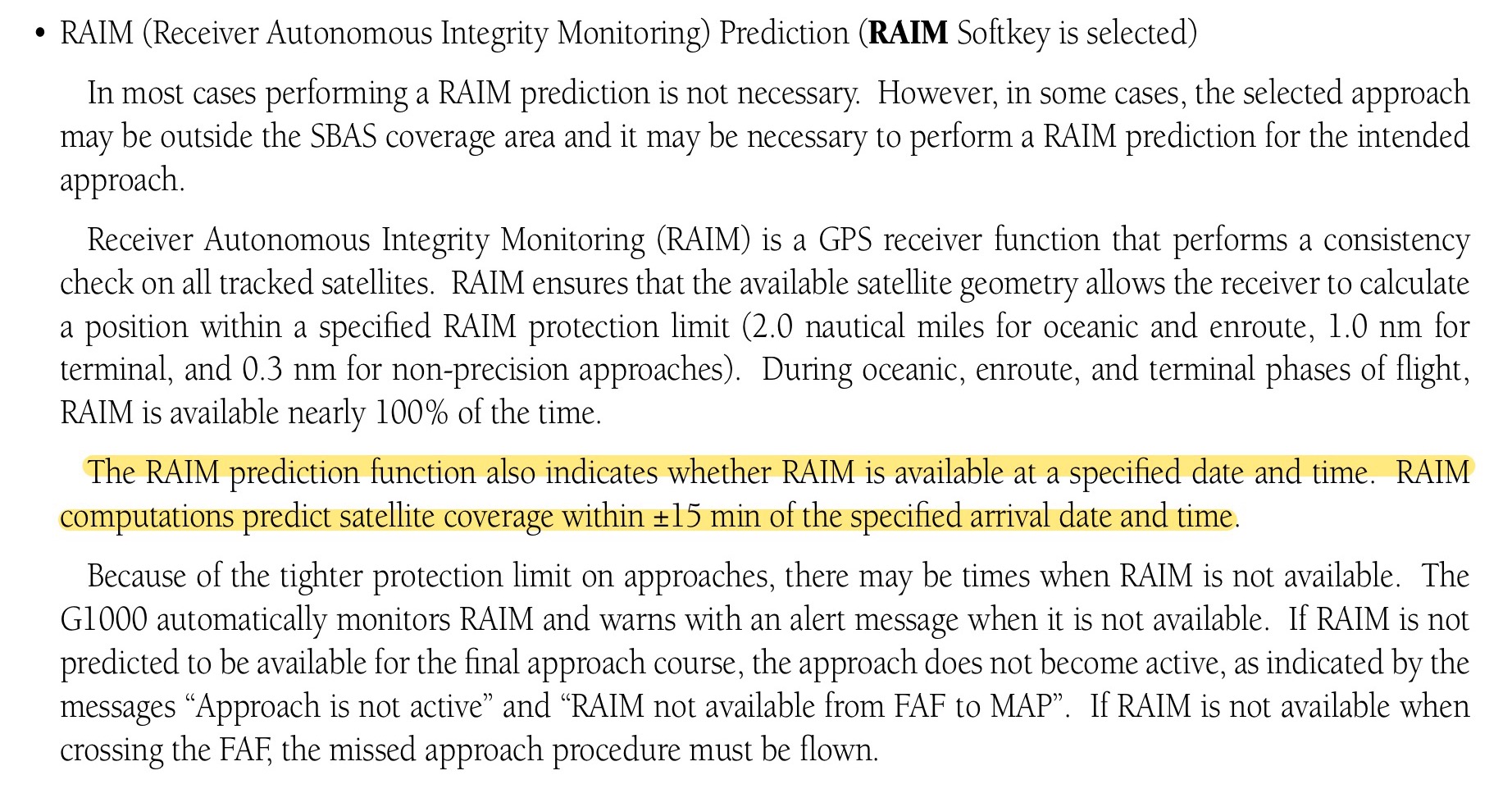
6. RAIM
RAIM 은 Receiver Autonomous Integrity Monitoring 의 약자이다.
하나의 software 로써
위성에서 보내지는 신호의 강도나 모든 위성의 상대적 위치를 파악하는 역할을 한다.
또, 신호의 강도를 파악하여 가장 좋은 신호의 위성 네 개나 그 이상을 고르거나
또는 상태가 좋지 않은 위성을 배제시키는 역할을 하기도 한다.
1) RAIM available
RAIM 이 Available 하기 위해서는
최소 5개의 sat. in view
또는
최소 4개의 sat. in view with barometric aiding
일 경우이다.
2) RAIM fail message
① not enough sat. available to provide RAIM
② potential error which exceeds the limit for the current phase of flight
3) Barometric Aiding
흔히 줄여 Baro aiding 이라 말한다.
GPS receiver 가 기체 내에 있는 pressure altimeter 정보를 사용하여 위치를 파악하게 만드는 것이다.
쉽게 생각해보면
보통 sat. 3개를 이용하여 두 개의 점을 구할 수 있다.
하나는 공중에 있고 하나는 땅에 있다.
자동차에서 사용하는 GPS 의 경우 자동차가 하늘을 날 경우는 없기 때문에 공중에 있는 위치정보는 제외 시키면 되지만 비행기는 그렇지 않다.
고도를 파악하기 위해 하나의 sat. 이 더 필요하다고 생각할 수 있는데 그것을 baro-aiding 으로 대신하는 것이다.
사용자가 임의로 사용할 수는 없으며
sat. in view 수가 줄어들 경우 receiver 가 자동으로 사용하게 되며
Baro aiding 을 사용하는 이점은
redundancy 와 GPS 를 통한 navigation coverage 를 증가시킬 수 있다는 것이다.
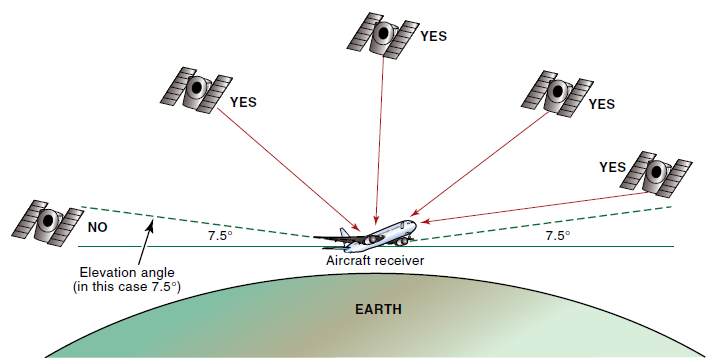
4) Masking Function
Masking Function 은 sat. 이 in view 에 있다 해도
ionosphere 와 troposphere 에서 신호의 왜곡이 있을 수 있기 때문에
이 위험을 배제시키는 것이다.
그래서 보통 비행기를 기준으로 7.5º 각도 아래의 위성을 제외시키게 된다.
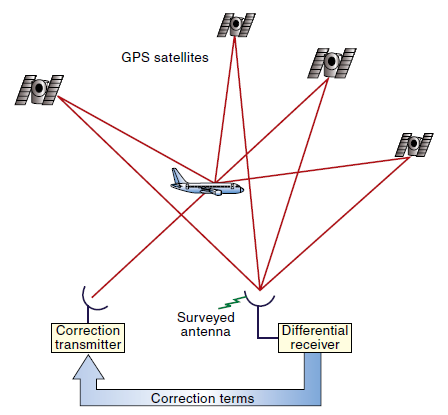
7. Differential GPS (DGPS - 흔히 WAAS)
흔히 받는 signal 은 C/A code 로 약 95% 의 정확도를 가진다. 높은 수치이긴 하나 아주 정밀한 수치는 아니다.
approach나 departure procedure 등을 위하여 이 정확도를 더욱 올릴 필요가 있다.
sat. 의 역할을 하는 것을 땅에 박아버리는 것이다.
땅에 박아 놓은 sat. 이 움직일일은 아마도 없을 것이며
그렇기 때문에 이 안테나의 정확한 위치를 알 수 있다. (정확도는 10meter 오차까지 올라감)
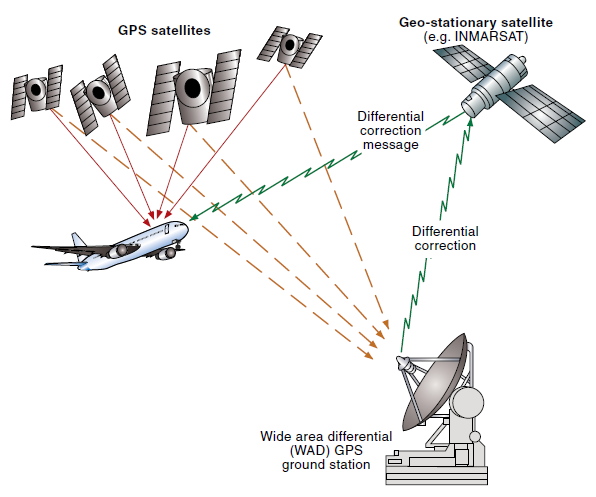
쉽게 설명하면
Sat.의 신호를
비행기에서도 받고 WAD GPS ground station 에서도 신호를 받는다.
그리고 똑같이 위치계산을 한다.
나온 위치계산의 값고 Ground station 의 실제 위치와의 차이를 계산한다
(Ground station 의 위치는 변화하지 않은 절대값)
그 오차를 Geo-stationary sat. 으로 보내고
그 위성에서 오차값을 비행기로 보낸다.
비행기에서는 일반 sat. 에서 받은 값에
Geo-stationary sat. 으로 받은 오차값을 이용해
더 정확한 정보를 읽어낸다.
이렇게 하여
100 meter 오차를 10 meter 오차까지 줄이게 된다.
8. Operations without RAIM
GPS receiver 는 보통 세 가지의 modes 를 지원한다
- navigation with RAIM
- navigation without RAIM
- loss of navigation (Dead Reckoning)
GPS 를 IFR 에 사용하기 위해서는 반드시 RAIM이 필요하다.
(RAIM이 불가능 할 경우 navigation과 ATC separation 불가능)
이 RAIM available 이 가능한지 확인하기 위해서는 여러가지 방법이 있다.
① FAA website (RAIM SAPT)
② GPS receiver in the aircraft
③ NOTAMs
④ FSS
RAIM avail 시간은 ETA를 기준으로 ±1시간 확인 가능하다.
1) Approach 중의 RAIM fail
① En-route 중
다른 종류의 approach 를 요청한다
② FAWP (Final Approach Waypoint) 이전 (approach 시작함)
MDA 아래로 내려가지 말고 lateral path 를 따라 go missed procedure 를 한다
('LOI' and 'ALERT' 발생 AIM 1-1-17 5(h), ATC에 보고)
③ FAWP 이후로 예상 될 경우
approach 를 계속 하게 하기 위해 5분간 특별한 알림이 뜨지 않는다.
④ FAWP 이후에 실제 fail 될 경우
바로 Go missed procedure 를 한다
FAWP 의 2NM 이전에 FAWP 에서 RAIM 가능할지 예측을 하게 된다. RAIM available 이라고 될 경우
"Armed" 에서 "Approach" 로 바뀌게 된다.
RAIM 은 prediction이다.
원하는 시간(ETA)의 ±1시간의 RAIM prediction 이 되는 것이다.
FAWP 이후에 RAIM fail 이 예상만 될 경우 (아직 FAIL 은 아님) approach 를 그대로 하게 하나
실제로 FAIL 이 될 경우 Go missed 를 시행한다.
8. GPS Approaches
GPS 가 대부분의 RNAV로 사용되기 때문에 GPS = RNAV 라고 생각하는 사람들이 많지만 실제로는 그렇지 않다.
RNAV는 VOR/VOR, VOR/DME, DME/DME등과 GPS 를 포함한다.
GPS 만을 이용한 Approach 는
GPS Stand-alone 이라고 하였다.
GPS 를 통하여 더 많은 종류의 IAP 가 생긴것은 맞다.
정확도도 어느정도 높으며 경제적이기 까지 하다.
그러나 GPS approach 는 precision approach 는 아니다.
WAAS 로 정확도를 올렸지만 non-precision 에 해당하며
조금 더 이야기 하면
Semi-precision approach 에 해당한다.
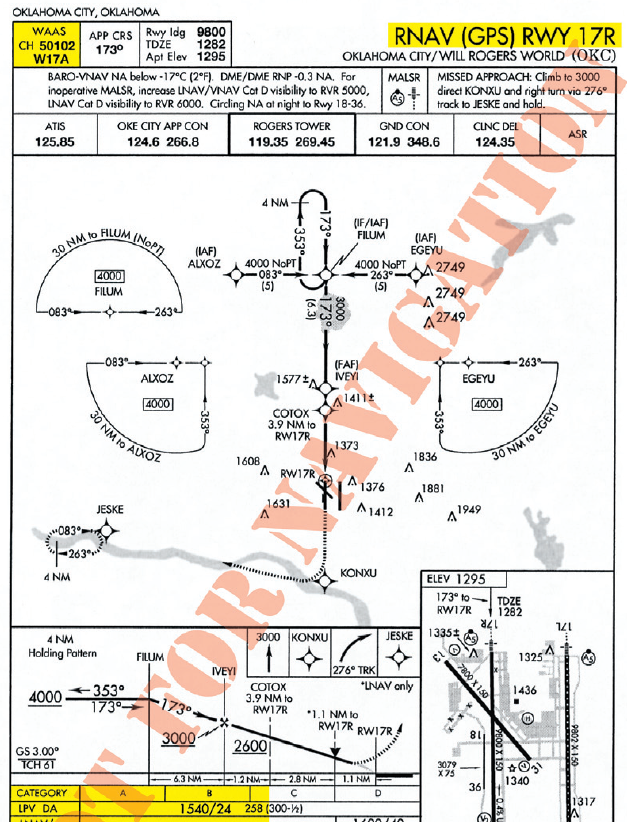
WAAS 를 이용하여 accuracy 와 integrity 가 증가한 GPS 는
APV (Approach with Vertical Guidance) 가 가능해졌고
거의 precision approach 의 performance 를 가진다.
그래서
non-precision approach 에 해당하지만
precision approach 와 같이 DA로 나타내게 된다.
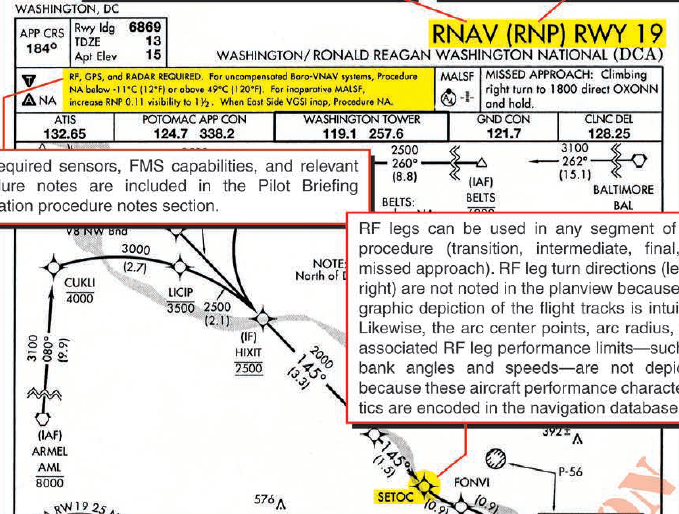
추가로 RNP (Required Navigation Performance) 라는 것도 있는데
이것은 accuracy와 intensity가 더 크며
RNP approach중 큰 것은 바로
"radius-to-fix legs" 또는 "RF legs" 라고 하는
curved flight track 이다.
9. Using GPS for IFR
- Required items
① RAIM (unless we have WAAS)
② GPS current data base
③ GPS must be certified by TSO
④ GPS must be installed according to specific regulations
⑤ GPS manual must be in the cockpit
⑥ must be equipped with an alternate approved and operational means of navigation suitable for navigating the proposed route of flight (ex, VOR or DME)
- Using GPS
① IFR enroute
② IFR Terminal
③ IFR approach
④ In Lieu of ADF and/or DME
'✈ 비행과 공부 > Instrument Rating' 카테고리의 다른 글
| VOR에 관해서 (0) | 2020.12.07 |
|---|---|
| Radar에 관해서 (0) | 2020.11.28 |
| NDB, ADF 에 관해서 (0) | 2020.11.24 |
| Area Navigation (RNAV) 에 관해서 (1) | 2020.11.22 |
| Departure procedure (DP) - ODP, SID 에 관해서 (2) | 2020.11.21 |




댓글